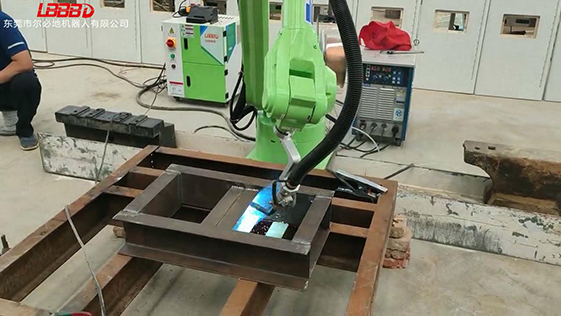
焊接機器人是焊接領域常見而且使用率較高的焊接設備,焊接機器人的焊接效率相比傳統焊接要快很多,焊接機器人主要有機器人本體和自動化焊接設備兩大部分構成。焊接機器人是集計算機、電子、傳感器、人工智能等多個方面知識于一體的現代化、自動化設備。焊接機器人主要有機器人本體和自動化焊接設備兩大部分構成。焊接機器人其易于實現焊接產品的穩定和提高,可以做到24小時連續生產,大幅度提高生產效率,同時替代人工在有害環境下長期工作。直接用于焊接的有電弧焊、電阻焊、氣焊等焊接機器人。
一、焊接機器人的組成部分
1、執行部分:這是焊接機器人為完成焊接任務而傳遞力或力矩并執行具體動作的機械結構。包括焊接機器人的機身、臂、腕、手等。
2、控制部分:負責控制機械結構按所規定的程序和所要求的軌跡,在規定的位置之間完成焊接作業的電子、電氣元件和計算機系統。
3、動力源及傳遞部分:它可為執行部分提供和傳遞機械能的部件與裝置,動力源多為電動或液壓。
4、工藝保障部分:主要包括機器人焊接電源、送絲、送氣裝置等。
二、焊接機器人的自由度選擇
焊接機器人的臂和腕是基本動作部分。任何一種設計的機器人臂部都有三個自由度,以保證臂的端部能夠到達其工作范圍內的任何一點。腕部的三個自由度是繞空間相互垂直的三個坐標軸X、Y、Z的回轉運動,通常稱其為滾轉、俯仰和偏轉運動。